
Pedro Morais
Research Scientist
Boston Dynamics
I currently work as a Staff Research Scientist at Boston Dynamics on the Atlas dexterous manipulation team.
Prior to joining Boston Dynamics I worked for 7 years at Agility Robotics where I was one of the first 20 employees and worked on a variety of topics spanning manifold optimization, whole body inverse kinematics, reinforcement learning, contact simulation, subsystem modeling and perception simulation.
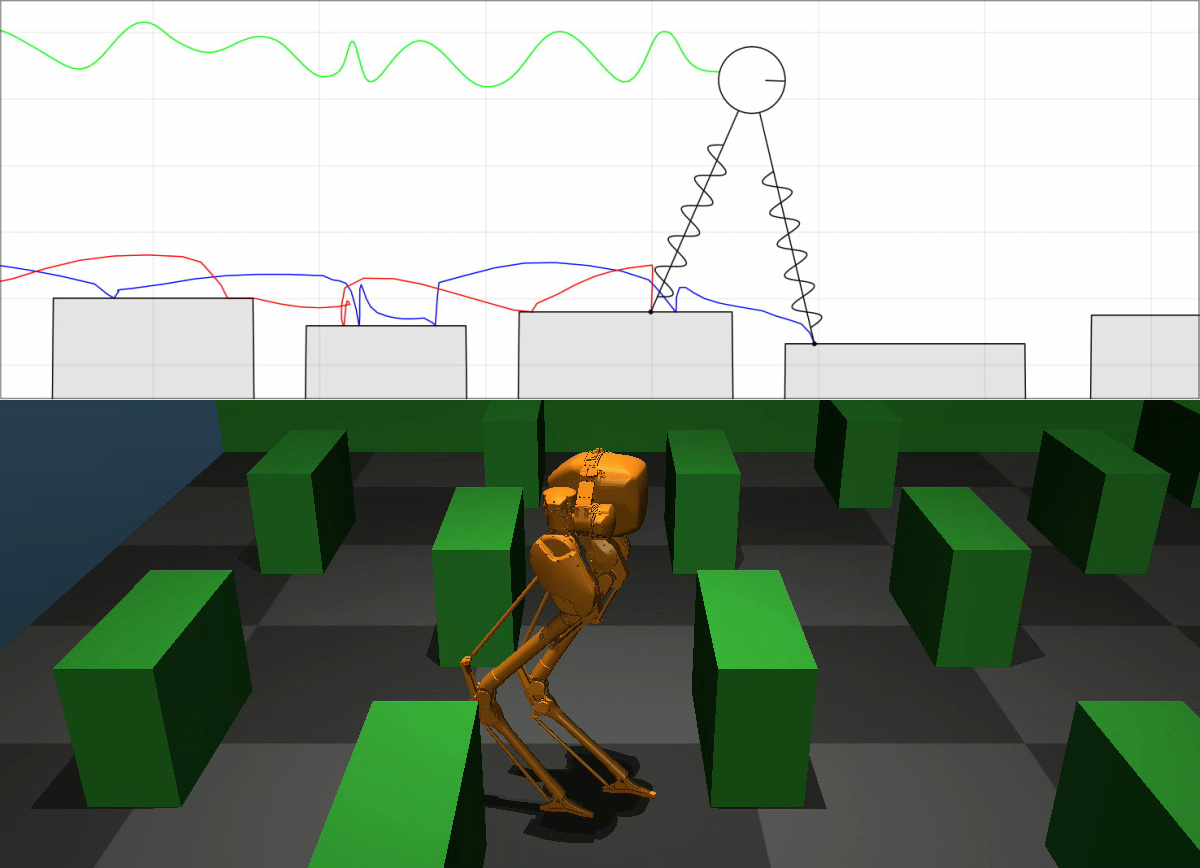
Before joining Agility I was an undergrad at Oregon State University where I did research on bipedal locomotion coadvised by Jonathan Hurst and Alan Fern. At OSU I spearheaded the transition of the Dynamic Robotics Laboratory from a hardware focused research group to a software and controls focused group with some of the earliest sim-to-real reinforcement learning results for bipedal running.
My interests broadly lie in the intersection of optimization, simulation and end-to-end learning and control of agile and dexterous humanoid robots.
Experience
Staff Research Scientist — Boston Dynamics
Staff Research Scientist at Boston Dynamics on the Atlas dexterous manipulation team.
Robotics Software Engineer — Agility Robotics
One of the first 20 employees at Agility Robotics. Most recently on the simulation and innovation teams, previously optimization and controls.
Research Assistant — Dynamic Robotics Lab
Advisor: Jonathan Hurst, Alan Fern
Planning and deep reinforcement learning based control for bipedal locomotion.
Publications
Humanoids (Sim-to-Real Workshop) 2025
Towards a Motion Foundation Model: General-Purpose Whole Body Control through Zero-Shot Sim-to-Real Reinforcement Learning
Jonah Siekman, Helei Duan, Pedro Morais, Chris Paxton, Izzy Brand, Yesh Godse, Alan Fern, Pras Velagapudi, Jonathan Hurst
CoRL 2019
Iterative Reinforcement Learning Based Design of Dynamic Locomotion Skills for Cassie
Zhaoming Xie, Patrick Clary, Jeremy Dao, Pedro Morais, Jonathan Hurst, Michiel van de Panne
ICAPS 2018
Monte-Carlo Planning for Agile Biped Locomotion
Patrick Clary, Pedro Morais, Alan Fern, Jonathan Hurst
Portfolio
Apex
A modular pytorch library implementing continuous reinforcement learning algorithms used by the Dynamic Robotics Lab.